Studio teorico/pratico
Domenica 24-2-2002
Le nuove pile e i nuovi piani.
| Per provare ad ottenere una
velocita' maggiore ho aggiunto due elementi in serie alla batteria, arrivando
cosi' a 9,6V. I nuovi elementi li ho messi sul piano superiore, collocati
in un portapile fissato con la solita tecnica del filo rigido cucito e
saldato.
La velocita' ottenuta con la nuova alimentazione e' di 26 cm/sec, pero' i motori cominciano a girare in modo troppo diverso l'uno dall'altro (tra l'altro si e' formato anche un piccolo gioco sull'asse... o forse c'era gia' prima e me ne sono accorto solo adesso, ma temo che siamo veramente ai limiti meccanici di questi motorini). A questo punto tengo i 9,6V e regolero' le velocita' con il PWM, magari scegliendone un valore intermedio di 22..23 cm/sec. |
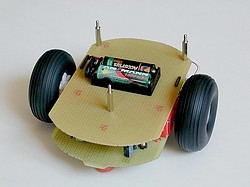 |
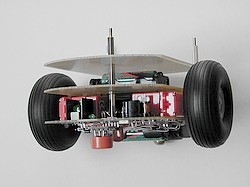
| Infine ho predisposto un terzo piano che si viene a trovare ad altezza ruota (circa 7 cm). In questi due nuovi piani devono trovare posto il microcontroller e il sistema di navigazione a infrarossi. I collegamenti tra i diversi piani sono realizzati con strisce di contatti in modo da poterli smontare facilmente e non avere cavi volanti tra l'uno e l'altro. | |
  |
|
I sensori per la navigazione a infrarossi.
| C'erano diverse
possibilita' per collocare i sensori, la piu' semplice dal punto di vista
del fissaggio e della quantita' di fili da far passare tra un piano e l'altro
portava pero' i sensori troppo in alto, vicino alla quota 10cm dove dovranno
trovarsi i sensori di luce. L'unica soluzione che mantiene la semplicita'
di montaggio spostando i sensori in basso prevede di montare i led emettitori
sul secondo piano, e i sensori veri e propri sulla base ad altezza motori
(in verita' avevo gia' previsto questa evenienza fin dall'inizio e avevo
lasciato lo spazio necessario).
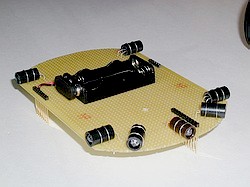
Ho scelto di disporre gli emettitori in 2 gruppi laterali paralleli (per poter seguire i contorni degli ostacoli o muoversi parallelamente ad essi) e un gruppo frontale di 3 led per l'obstacle avoidance (a 45 gradi l'uno dall'altro). Vista la sensibilita' dei ricevitori infrarossi e' necessario schermare i led con dei tubetti (si possono ricavare da dei pennarelli neri) in modo da evitare che il sensore saturi per il segnale diretto invece di rilevare quello riflesso (e spero di non dover tappare anche il retro dei tubetti da cui escono i pin dei led). |
|
  |
|
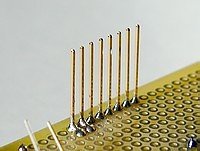
| Sulla base, esattamente sotto ad ogni emettitore e allineato con essi, ho posizionato i ricevitori, montati su zoccolo in modo sia da poterli facilmente sostituire o riutilizzare in altri progetti, sia da avere l'area ricevente la piu' vicina possibile all'asse di emissione dei led. | |
 |
Qualche prova con gli infrarossi.
 I
sensori che ho scelto sono i GP1U281Q della Sharp, dispongono al loro interno
di un completo demodulatore a 38kHz e di un pin di uscita che va a livello
basso quando vengono rilevati i 38kHz. Gli altri due pin sono Vcc (+5V)
e massa, piu' uno schermo metallico esterno da collegare a massa.
I
sensori che ho scelto sono i GP1U281Q della Sharp, dispongono al loro interno
di un completo demodulatore a 38kHz e di un pin di uscita che va a livello
basso quando vengono rilevati i 38kHz. Gli altri due pin sono Vcc (+5V)
e massa, piu' uno schermo metallico esterno da collegare a massa.
Ho fatto qualche prova con due normali telecomandi per televisione collegando l'uscita OUT ad un oscilloscopio, e ho verificato che questi sensori, come mi aspettavo, sono molto sensibili, e rivelano benissimo il codice del telecomando anche se puntato contro il muro dall'altra parte della stanza o in altre direzioni.
Quello che invece non mi aspettavo e' che
se sono investiti dalla luce di una normale torcia elettrica, o se vengono
messi in piena luce solare, sull'uscita generano degli impulsi random di
circa 1 mS... comunque in questi casi se si invia anche un segnale con
il telecomando quest'ultimo ha il sopravvento e sull'uscita del sensore
si trova la corretta sequenza di bit... ma non vorrei dover effettuare
il ranging inviando degli pseudocodici!!!!
| <--Indietro
| Inizio | Avanti-->
|
Pagina, disegni e foto realizzati da Claudio Fin - Ultimo aggiornamento 1-3-2002