Studio teorico/pratico
Sabato 16-2-2002
IL survoltore, il sensore del gas,
il driver di potenza...
| Per poter alimentare in modo perfettamente stabilizzato i circuiti logici, ad avere anche una tensione sufficientemente elevata e stabile per gli amplificatori operazionali (che serviranno per la sensoristica), ho realizzato un survoltore utilizzando un LM2577T12 (step-up converter). Questo integrato fornisce in uscita 12V stabilizzati anche quando in ingresso ce ne sono molti di meno. Il regolatore da 5V serve per alimentare il driver di potenza per i motori e l'elemento riscaldante del sensore di gas. |  |
| Il sensore del gas va posto sotto la base rivolto verso il pavimento ad alcuni millimetri da esso. L'elemento riscaldante interno va alimentato a 5V e assorbe circa 150mA, questo significa che dissipa oltre 0,5W di potenza elettrica e diventa piuttosto caldo... e' normale che la prima volta che viene acceso faccia un po' di puzza. Sul terminale Vout e' presente una tensione tanto piu' alta quanto maggiore e' la concentrazione di gas rilevata, a riposo ho misurato circa 1,8V, che salgono anche a 3..4V quando nelle vicinanze si passa con un batuffolo di cotone imbevuto di alcol (la salita della tensione e' abbastanza veloce, la discesa invece, quando l'alcol e'stato tolto, richiede molti secondi). Il jupmer JP2 permette di togliere alimentazione al sensore. |  |
Lo schema seguente e' il driver di potenza per i motori. Si basa su un L293B che permette di comandare 4 uscite push pull da 1A ciascuna (1Y..4Y). Collegandolo come in figura si possono realizzare due ponti ad H completi, pilotabili in PWM e con controllo del senso di rotazione. I diodi shottky 11DQ06 proteggono le uscite del 293 dalle extratensioni che si generano pilotando un carico induttivo. Le porte del 7414 permettono di comandare i motori inviando semplicemente il segnale PWM e quello di direzione. Collegando direttamente PWM1 e PWM2 a massa i motori girano alla massima velocita' nel senso scelto con DIR1 e DIR2. Il jumper JP3 permette di disalimentare l'intera sezione di potenza.
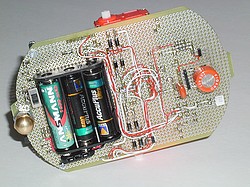
| Ecco la base completata con i circuiti precedenti. Il driver di potenza e' situato tra i due motori ed e'dotato di aletta dissipatrice (messa piu' che altro per prova e per sicurezza). Sulla parte davanti ci sono i regolatori di tensione e, sotto, il sensore del gas. |
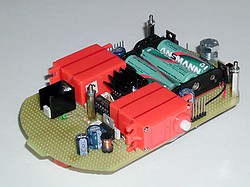  |
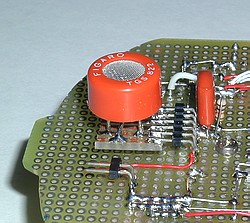
| Vista di lato e particolare del sensore di gas TGS822. |
  |
Deambula!!!!!
 Ed
ecco le prime impressioni su strada...
Ed
ecco le prime impressioni su strada...
E' molto piu' lento del previsto, circa 18 cm/sec contro i 25 che avrei voluto... visto che le ruote non ho intenzione di cambiarle dovrei salire con la tensione... un piccolo aiuto intanto puo' essere dato dal bypassare il diodo sul ramo di potenza positivo che esce dalla batteria... comunque per questo vedremo.
La rotazione su se'stesso invece e' praticamente perfetta, dopo oltre 10 giri completi lo spostamento rispetto al centro e' minore di 1 cm!!!
L'influenza di fessurazioni sul pavimento e' minore di quanto mi aspettavo, molto bene...
La convergenza delle ruote non e' perfetta e il fissaggio a fascette permette un minimo gioco, questo significa che a seconda della situazione il bot tende leggermente a destra o a sinistra, ma abbastanza poco da essere del tutto ininfluente in un campo come quello di gara, dove tra l'altro la traiettoria verra' continuamente corretta dal sistema di navigazione a infrarossi e cambiata per la presenza dei numerosi ostacoli..
Il fatto di muoversi piu' lentamente del
previsto, ma dell' andare nel contempo anche piu' dritto del previsto,
potrebbe semplificare il controllo, che invece di essere un pwm a piu'
velocita' potrebbe essere un semplice controllo on/off, sia per la marcia
che per la direzione. L'inversione improvvisa del senso di rotazione di
una o di entrambe le ruote non causa alcuna instabilita' e quello che pensavo
essere un difetto delle gomme morbide e deformabili diventa invece un ottimo
fattore ammortizzante, anche nei confronti delle asperita' che possono
dar fastidio al caster.
| <--Indietro
| Inizio | Avanti-->
|
Pagina, disegni e foto realizzati da Claudio Fin - Ultimo aggiornamento 16-3-2002