Studio teorico/pratico
Giovedì
14-2-2002
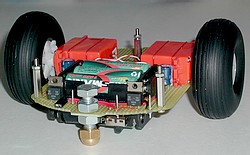
La base, il caster, i portapile.
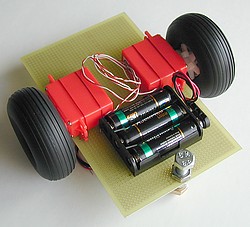
| Ci sono diverse possibilita' per realizzare il terzo punto di appoggio per la base del bot. Non ho trovato una rotella a sfera abbastanza piccola o una ruota pivottante adatta. Quella della foto non gira abbastanza bene sulle superfici lisce soprattutto e' doppia, questo significa che la base deve essere perfettamente orizzontale, altrimenti la ruota tende a stare girata da un lato. La sferetta dello "scrocchietto" per armadi e' difficile da attaccare alla base, il dado cieco da 8mm si applica invece in modo semplicissimo e pertanto ho deciso di provare con quest'ultimo (anche se puo' essere molto sensibile alle fessure sul pavimento). |  |
| I gruppi motoruota e i portapile li ho applicati alla basetta millefori di base con la tecnica del filo rigido tirato e saldato, ottenendo una buona tenuta e immobilita'. | |
   |
|
L'alimentazione.
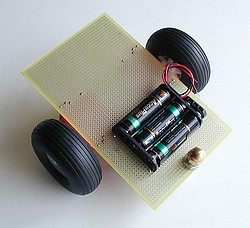
| Ho previsto di alimentare il robot a 7,2V tramite 6 elementi ricaricabili NiMh. Per avere una certa separazione tra circuito di potenza (alimentazione motori) e circuiti di comando (microcontroller, sensori) ho creato due rami, divisi da due diodi, con i percorsi fisicamente sdoppiati (compreso il percorso di massa), se questo accorgimento sara' sufficiente lo vedro' solo piu' avanti in quanto sto procedendo senza un progetto ben preciso. I terminali A B e C servono per intervenire sull'alimentazione dall'esterno, per esempio tenendo aperto l'interruttore di alimentazione e' possibile alimentare il circuito dall'esterno collegandosi sui punti A e C. Oppure e' possibile ricaricare la batteria collegandosi ai punti B e C. Il ponticello JP1 serve come ulteriore punto di sezionamento della batteria. |  |
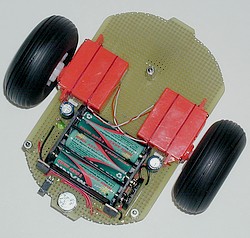
| Inoltre ho sagomato la base in modo da poterla assimilare all'incirca ad un cilindro (comprendendo anche le ruote) e ho predisposto i distanziatori per il fissaggio del piano superiore: | |
  |
|
| <--Indietro | Inizio | Avanti--> |